import warnings
warnings.filterwarnings("ignore",
category=UserWarning,
message="Numpy fft .* faster than pyfftw.*")
Getting Started in Higher Dimensions#
In Getting Started with the GPE, we looked at Josephson oscillations in 1D trapped gas. (We assume you have read this document.) Here we consider a similar problem, but extended to 3D.
The Problem#
The problem we will consider here is the evolution of a dark soliton imprinted in a harmonically trapped gas at some position \(x_s\). We expect the soliton to oscillate back and forth with the trapping period \(T_x\).
We consider a harmonically trapped gas with trapping frequencies \(\omega_x \ll \omega_y, \omega_z\), typically expressed \(\omega = 2\pi f\) where \(f\) is in Hz. The experiments typically report the total number of atoms \(N\), which is related to the chemical potential \(\mu\), and the Thomas-Fermi “radius” \(x_{TF}\) where density vanishes:
Do it! Derive this using the Thomas-Fermi approximation.
The Thomas-Fermi (TF) approximation neglects the gradient terms, assuming that the equation of state matches the potential locally:
Inverting this, we have the Thomas-Fermi approximation
We can directly integrate, but to make the integration variable spherically symmetric, it is useful to introduce the variables \(q_i = \omega_i r_i\) so that the integral becomes
As a quick check, the dimensions are correct and \(N\) is dimensionless as expected (note: \([\mu] = [gn] = E = MD^2/T^2\), \([g] = MD^5/T^2\)):
The TF radius along an appropriate axis is where \(\mu = m\omega_x^2x^2/2\) so the density vanishes.
As a check, consider Eq. (6.34) from [Pethick and Smith, 2002]:
where \(U_0 = g\), and \(\bar{\omega} = \sqrt[3]{\omega_x\omega_y\omega_z}\) is the geometric mean of the frequencies.
We introduce here a slightly more general way of dealing with states. Instead of
putting everything into the State class, we create an Experiment class and pass this
to the state. We inform our state by inheriting from
StateWithExperimentMixin which delegates the appropriate functions to
the experiment. This allows us to use a variety of different states that all use the
same Experiment, e.g., to use different states for different 3D approximations:
gpe.tube: Effective 1D Non-Polynomial Schrödinger Equation (NPSEQ) and Dynamically Rescaled GPE (dr-GPE) that approximates simple radial dynamics. Does not allows vortex rings etc.gpe.axial: Effective 2D assuming axial (rotational) symmetry.gpe.bec: Full 3D simulations.
We start with the formulation in 3D, then specialize.
import numpy as np
import matplotlib.pyplot as plt
import gpe.bec, gpe.utils, gpe.minimize
u = gpe.bec.u
class StateMixin(gpe.utils.StateWithExperimentMixin):
def get_ws(self, t=None):
# Needed for codes that support expansion.
return self.experiment.ws
class State(StateMixin, gpe.bec.StateBase):
"""Simple 3D state."""
pass
class Experiment(gpe.bec.GPEMixin, gpe.bec.HOMixin, gpe.utils.ExperimentBase):
"""Experiment for domain wall oscillations."""
# Physical parameters for experiment
trapping_frequencies_Hz = (50.0, 100.0, 100.0) # Trap frequencies
Ntot = 200 # Number of particles
m = u.m_Rb87 # We use 87Rb here.
hbar = u.hbar # Physical units according to `gpe.bec.u`.
species = (2,0) # Which hyperfine state - defines the interaction.
# Numerical parameters
L_TF = 1.5 # Length of box as a fraction of the TF radius
dx_healing_length = 0.5 # Minimum resolution
# Parameter for knife-edge and phase imprint
x0_TF = 0.1 # Location of imprint in units of x_TF
V0_mu = 2.0 # Depth of the knife
sigma_healing_length = 0.2 # With of knife in healing_lengths
dphi = np.pi # Initial phase difference
# Required by IExperimentMinimal
t_unit = NotImplemented
t_name = NotImplemented
image_ts_ = np.arange(11, 0.1)
State = State # Which state to use
def init(self):
"""Perform any initializations."""
a = u.scattering_lengths[(self.species, self.species)]
self.g = 4*np.pi * self.hbar**2 * a / self.m
self.ws = 2*np.pi * np.asarray(self.trapping_frequencies_Hz) * u.Hz
# We use the trap frequency as a time unit.
self.t_unit = 2*np.pi / self.ws[0]
self.t_label = "$T_x$"
# Use TF results to get mu from Ntot
V_TF = self.m/2 * (
15*self.g * np.prod(self.ws) * self.Ntot
/ (4*np.pi * self.m))**(2/5)
self.mu = V_TF # Not accurate
self.healing_length = self.hbar / np.sqrt(2 * self.m * self.mu)
rs_TF = np.sqrt(2 * self.mu / self.m) / self.ws
self.Lxyz = 2 * self.L_TF * rs_TF
dx = self.dx_healing_length * self.healing_length
# Get good lattice sizes for use with the FFT (small prime factors)
self.Nxyz = list(map(gpe.utils.get_good_N, self.Lxyz / dx))
self.V0 = self.V0_mu * self.mu
self.sigma = self.sigma_healing_length * self.healing_length
x_TF = rs_TF[0]
self.x0 = self.x0_TF * x_TF
self.state_args = dict(
Nxyz=self.Nxyz, Lxyz=self.Lxyz,
mu=self.mu, g=self.g, m=self.m, hbar=self.hbar)
super().init() # Be sure to call other init() functions.
def get_state(self, initialize=True):
"""Return (quickly) a state instance."""
return self.State(experiment=self, **self.state_args)
def get_initial_state(self, N=None):
"""Return the initial state for a simulation."""
state0 = self.get_state()
if N is not None:
state0.scale(np.sqrt(N/state0.get_N()))
# The experiments imprint the phase with an external step potential.
# We cheat here by minimizing with the desired phase.
x = state0.xyz[0] + np.zeros(state0.shape) # Sometimes we need a full array
phase = np.exp(1j*np.where(x < self.x0, -self.dphi/2, self.dphi/2))
minimizer = gpe.minimize.MinimizeStateFixedPhase(state0, phase=phase, fix_N=True)
state0 = minimizer.minimize()
# Always use a fresh state in case the minimizer alters cooling_phase etc.
state = self.get_state()
state.set_psi(state0.get_psi())
return state
def get_Vknife(self, x):
"""Return the knife-edge potential which divides the cloud in two."""
return self.V0 * np.exp(-(x/self.sigma)**2/2)
@gpe.utils.i_know_this_is_slow # Suppresses PerformanceWarning
def get_Vext(self, state):
"""Return Vext. The state will call this."""
xyz = state.get_xyz()
Vext = self.m / 2 * sum([(w*x)**2 for w, x in zip(self.ws, xyz)])
if state.initializing or state.t < 0:
# This code only gets executed if we are initializing the state, or evolving
# for negative times (wehich we might do for imaginary time initialization).
# We initialize with the knife edge in place. We then evolve without the
# knife. Note: The underlying code calls `get_Vext_mu()` which also
# subtracts `self.mu`: we should not do that here.
x = xyz[0]
Vext += self.get_Vknife(x-self.x0)
return Vext
e = Experiment(V0_mu=0) # Turn off knife to check TF approximation
print(f"{e.Nxyz = }: states will take {np.prod(e.Nxyz)*16/1024**2:.2g}MiB")
s0 = e.get_state()
s0.plot()
assert np.allclose(s0.get_N(), e.Ntot, rtol=1e-3)
e.Nxyz = [array(27), array(15), array(15)]: states will take 0.093MiB
/home/docs/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/gpe/bec.py:1135: RuntimeWarning: divide by zero encountered in log10
ir, uv = map(np.log10, self.get_convergence())
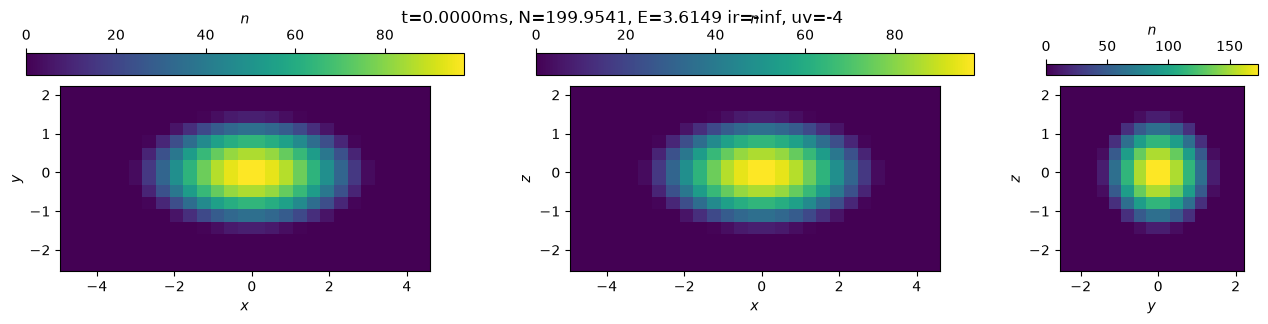
e = Experiment()
%time s = e.get_initial_state()
s.plot()
print(f"μ/ℏω = {s.mu/(s.hbar*e.ws[1]):.4f}")
CPU times: user 1.99 s, sys: 1.69 ms, total: 1.99 s
Wall time: 1.01 s
---------------------------------------------------------------------------
KeyboardInterrupt Traceback (most recent call last)
Cell In[4], line 2
1 e = Experiment()
----> 2 get_ipython().run_line_magic('time', 's = e.get_initial_state()')
3 s.plot()
4 print(f"μ/ℏω = {s.mu/(s.hbar*e.ws[1]):.4f}")
File <timed exec>:1
----> 1 'Could not get source, probably due dynamically evaluated source code.'
Cell In[2], line 96, in Experiment.get_initial_state(self, N)
92 # We cheat here by minimizing with the desired phase.
93 x = state0.xyz[0] + np.zeros(state0.shape) # Sometimes we need a full array
94 phase = np.exp(1j*np.where(x < self.x0, -self.dphi/2, self.dphi/2))
95 minimizer = gpe.minimize.MinimizeStateFixedPhase(state0, phase=phase, fix_N=True)
---> 96 state0 = minimizer.minimize()
97
98 # Always use a fresh state in case the minimizer alters cooling_phase etc.
99 state = self.get_state()
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/gpe/minimize.py:861, in MinimizeStateFixedPhase.minimize(self, **kw)
859 N = np.prod(self.phase.shape)
860 bounds = [(0, np.inf)] * N
--> 861 return super().minimize(use_scipy=True, bounds=bounds, **kw)
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/gpe/minimize.py:770, in MinimizeState.minimize(self, psi_tol, E_tol, callback, _debug, **kw)
768 return super().minimize(_debug=_debug, **kw)
769 else:
--> 770 x = super().minimize(**kw)
772 state = self.unpack(x)
774 if self.fix_N:
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/gpe/minimize.py:284, in Minimize.minimize(self, plot, callback, method, polish, broyden_alpha, broyden_opts, f_tol, x_tol, use_scipy, ignore_f, _test, _debug, _log, use_cache, bounds, **kw)
282 if Version(sp.__version__) > Version("1.15.0"):
283 options.pop("disp", None)
--> 284 res = self._minimize(
285 f=_f,
286 df=_df,
287 x0=_x[0],
288 method=method,
289 callback=callback_,
290 bounds=bounds,
291 options=options,
292 )
294 self.minimize_results = res
296 if not res.success:
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/gpe/minimize.py:313, in Minimize._minimize(self, f, df, x0, method, callback, bounds, options)
311 def _minimize(self, f, df, x0, method, callback, bounds, options):
312 """Interface to the scipy minimizer."""
--> 313 res = sp.optimize.minimize(
314 fun=f,
315 jac=df,
316 x0=x0,
317 method=method,
318 callback=callback,
319 bounds=bounds,
320 options=options,
321 )
322 res.f = f
323 res.df = df
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/scipy/optimize/_minimize.py:784, in minimize(fun, x0, args, method, jac, hess, hessp, bounds, constraints, tol, callback, options)
781 res = _minimize_newtoncg(fun, x0, args, jac, hess, hessp, callback,
782 **options)
783 elif meth == 'l-bfgs-b':
--> 784 res = _minimize_lbfgsb(fun, x0, args, jac, bounds,
785 callback=callback, **options)
786 elif meth == 'tnc':
787 res = _minimize_tnc(fun, x0, args, jac, bounds, callback=callback,
788 **options)
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/scipy/optimize/_lbfgsb_py.py:420, in _minimize_lbfgsb(fun, x0, args, jac, bounds, maxcor, ftol, gtol, eps, maxfun, maxiter, callback, maxls, finite_diff_rel_step, workers, **unknown_options)
412 _lbfgsb.setulb(m, x, low_bnd, upper_bnd, nbd, f, g, factr, pgtol, wa,
413 iwa, task, lsave, isave, dsave, maxls, ln_task)
415 if task[0] == 3:
416 # The minimization routine wants f and g at the current x.
417 # Note that interruptions due to maxfun are postponed
418 # until the completion of the current minimization iteration.
419 # Overwrite f and g:
--> 420 f, g = func_and_grad(x)
421 elif task[0] == 1:
422 # new iteration
423 n_iterations += 1
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/scipy/optimize/_differentiable_functions.py:412, in ScalarFunction.fun_and_grad(self, x)
410 if not np.array_equal(x, self.x):
411 self._update_x(x)
--> 412 self._update_fun()
413 self._update_grad()
414 return self.f, self.g
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/scipy/optimize/_differentiable_functions.py:362, in ScalarFunction._update_fun(self)
360 def _update_fun(self):
361 if not self.f_updated:
--> 362 fx = self._wrapped_fun(self.x)
363 self._nfev += 1
364 if fx < self._lowest_f:
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/scipy/_lib/_util.py:545, in _ScalarFunctionWrapper.__call__(self, x)
542 def __call__(self, x):
543 # Send a copy because the user may overwrite it.
544 # The user of this class might want `x` to remain unchanged.
--> 545 fx = self.f(np.copy(x), *self.args)
546 self.nfev += 1
548 # Make sure the function returns a true scalar
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/gpe/minimize.py:160, in Minimize.minimize.<locals>._f(x)
154 if (
155 not use_cache
156 or _cache[1] is None
157 or not np.allclose(x, _cache[0], atol=1e-32, rtol=_EPS)
158 ):
159 _cache[0] = x.copy()
--> 160 _cache[1:] = self.f_df(x)
161 if _log:
162 self._calls.append(tuple(_cache))
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/gpe/minimize.py:833, in MinimizeStateFixedPhase.f_df(self, x)
830 if self.fix_N:
831 s, N = psi.normalize()
--> 833 Hpsi = psi.get_Hy(subtract_mu=self.fix_N)
834 Hpsi *= self.phase.conj()
836 if self.fix_N:
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/gpe/bec.py:895, in _StateBase.get_Hy(self, subtract_mu)
893 """Return `H(y)` for convenience only."""
894 dy = self.empty()
--> 895 self.compute_dy_dt(dy=dy, subtract_mu=subtract_mu)
896 Hy = dy / self._phase
897 return Hy
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/gpe/bec.py:793, in _StateBase.compute_dy_dt(self, dy, subtract_mu)
791 y = self
792 Ky = y.copy()
--> 793 Ky.apply_laplacian(factor=self.K_factor)
794 Vy = y.copy()
795 Vy.apply_V(V=self.get_V_GPU())
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/gpe/bec.py:876, in _StateBase.apply_laplacian(self, factor, exp, **_kw)
874 if _v is not None:
875 _kw[_k] = _v
--> 876 self.data[...] = self.basis.laplacian(self.data, factor=factor, exp=exp, **_kw)
878 if self.Omega:
879 assert not exp
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/mmfutils/math/bases/bases.py:432, in PeriodicBasis.laplacian(self, y, factor, factors, exp, kx2, k2, kwz2, **_kw)
430 # Apply K
431 yt = self.fftn(y)
--> 432 laplacian_y = self.ifftn(
433 self._apply_K(yt, kx2=kx2, k2=k2, exp=exp, factor=factor, factors=factors)
434 )
436 if kwz2 != 0:
437 if exp:
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/mmfutils/math/bases/bases.py:505, in PeriodicBasis.ifftn(self, x)
503 """Perform the ifft along spatial axes"""
504 axes = self.axes % len(x.shape)
--> 505 return self._ifftn(x, axes=axes)
File ~/checkouts/readthedocs.org/user_builds/gpe/conda/latest/lib/python3.14/site-packages/mmfutils/performance/fft.py:473, in ifftn(a, s, axes)
471 if key not in _FFT_CACHE:
472 _FFT_CACHE[key] = get_ifftn(a=a.copy(), s=s, axes=axes)
--> 473 res = _FFT_CACHE[key](a)
474 if _COPY_OUTPUT and not res.flags["OWNDATA"]:
475 res = res.copy()
KeyboardInterrupt:
from pytimeode.evolvers import EvolverABM
def evolve(state, periods=1, Nt=100, dt_t_scale=0.1):
"""Evolve the state for the specified number of periods."""
e = state.experiment
T = 2*np.pi * periods / e.ws[0]
dT = T / Nt
dt = dt_t_scale * state.t_scale
steps = int(max([np.ceil(dT / dt), 2]))
dt = dT / steps
ev = EvolverABM(state, dt=dt)
states = [ev.get_y()]
for frame in range(Nt):
ev.evolve(steps)
states.append(ev.get_y())
return states
def plot(states):
s = states[-1]
e = s.experiment
Tx = 2*np.pi / e.ws[0]
ns = np.array([s.get_density_x() for s in states])
ts = [s.t for s in states]
xs = s.xyz[0].ravel()
fig, ax = plt.subplots()
mesh = ax.pcolormesh(ts / Tx, xs / u.micron, ns.T * u.micron)
fig.colorbar(mesh, ax=ax, label="$n_{1D}$ [1/micron]")
ax.set(xlabel="$t/T_x$", ylabel="$x$ [micron]")
e = Experiment()
%time s = e.get_initial_state()
%time states = evolve(s, periods=2)
plot(states);
Notice that the frequency of the soliton is close, but not exactly commensurate with the trapping frequency. This is an indication that the excitation is almost a domain wall, but that that there are additional excitations. Here is the final state:
states[-1].plot();
Axial Symmetry#
For these simulations, we have strict axial symmetry. Thus, we should be able to work
in cylindrical coordinates. This is done by gpe.axial. We can use the same
experiment, but need to use a different state class. The arguments are also a little
different, so we subclass the experiment to overload state_args.
import gpe.axial
# Note: StateMixing must come first so that we can assign the experiment.
class StateAxial(StateMixin, gpe.axial.StateAxialBase):
pass
class ExperimentAxial(Experiment):
# This is much cheaper, so we can be more generous.
L_TF = 2.0
dx_healing_length = 0.4
State = StateAxial
def init(self):
super().init()
Nxr = (self.Nxyz[0], max(self.Nxyz[1:]) // 2 + 1)
Lxr = (self.Lxyz[0], max(self.Lxyz[1:]) / 2.0)
# Current code requies a basis... this should be fixed
self.state_args['basis'] = gpe.axial.CylindricalBasis(
Nxr=Nxr, Lxr=Lxr, symmetric_x=False)
self.state_args.pop('Nxyz')
self.state_args.pop('Lxyz')
ea = ExperimentAxial(V0_mu=0)
sa = ea.get_state()
assert np.allclose(sa.get_N(), ea.Ntot, rtol=1e-2)
print(sa.shape)
ea = ExperimentAxial()
sa = ea.get_state()
sa.plot();
e_axial = ExperimentAxial()
%time s_axial = e_axial.get_initial_state(N=states[0].get_N())
s_axial.plot();
%time states_axial = evolve(s_axial, periods=2)
plot(states_axial)
Let’s make a movie comparing the two simulations. We can use gpe.contexts.FPS
for this.
from mmf_contexts import FPS
fig, ax = plt.subplots()
for s, sa in FPS(list(zip(states, states_axial)), fig=fig, embed=True):
ax.cla()
ax.plot(s.x, s.get_density_x())
ax.plot(sa.x, sa.get_density_x())
ax.set(xlabel="$x$ [micron]", ylabel="$n_{1D}$ 1/micron")
Note that these movies do not exactly match: this is because we have not reached converged physics with the 3D simulation. Here we do just a little evolution with a converged state. This takes more time.
kw = dict(L_TF=3.0, dx_healing_length=0.2)
e = Experiment(**kw)
ea = ExperimentAxial(**kw)
%time s = e.get_initial_state(N=165)
%time sa = ea.get_initial_state(N=165)
r = np.sqrt(sum(x**2 for x in s.xyz[1:])).ravel()
ri = np.argsort(r)
r = r[ri]
n3 = s.get_density().reshape((s.shape[0], len(r)))[:, ri]
Psi = sa.basis.get_Psi(r)
na = abs(Psi(sa.get_psi()))**2
assert np.allclose(s.x.ravel(), sa.x.ravel())
fig, (ax0, ax1, ax01) = plt.subplots(1, 3, figsize=(15,3))
kw = dict(vmin=-8, vmax=np.log10(n3).max())
ax0.pcolormesh(s.x.ravel(), r, np.log10(n3).T, **kw)
ax1.pcolormesh(s.x.ravel(), r, np.log10(na).T, **kw)
mesh = ax01.pcolormesh(s.x.ravel(), r, np.log10(abs(na-n3)).T, **kw)
fig.colorbar(mesh, ax=ax01)
plt.plot(s.x, s.get_density_x(), label='3D')
plt.plot(sa.x, sa.get_density_x(), label='Axial')
plt.legend()
#%time satates3 = evolve(s, Nt=100//4, periods=2/4)
#e = Experiment(L_TF=2.5)
#%time s = e.get_initial_state(N=states_axial[0].get_N())
#%time states3 = evolve(s, Nt=100//4, periods=2/4)
e = Experiment(L_TF=2.5)
ea = ExperimentAxial(L_TF=2.5)
%time s = e.get_initial_state()
%time sa = ea.get_initial_state()
fig, ax = plt.subplots()
ax.plot(s.x, s.get_density_x(), label='3D')
ax.plot(sa.x, sa.get_density_x(), label='Axial')
ax.legend()
Tube NPSEQ#
If not too many radial modes are populated, then one might expect that the radial degrees of freedom can be “integrated out”. One way of doing this results in an effective 1D theory called the Non-Polynomial Schrödinger Equation (NPSEQ).
from importlib import reload
import gpe.tube;reload(gpe.tube)
# Note: StateMixing must come first so that we can assign the experiment.
class StateTube(StateMixin, gpe.tube.StateGPEdrZ):
pass
class ExperimentTube(Experiment):
# This is much cheaper, so we can be more generous.
L_TF = 2.0
dx_healing_length = 0.4
State = StateTube
def init(self):
super().init()
Nx = self.Nxyz[0]
Lx = self.Lxyz[0]
self.state_args.update(Nxyz=(Nx,), Lxyz=(Lx,))
state = self.get_state()
e = ExperimentTube(V0_mu=0)
s = e.get_state()
assert np.allclose(s.get_N(), e.Ntot, rtol=1e-2)
print(s.shape)
e_tube = ExperimentTube()
s_tube = e_tube.get_state()
s_tube.plot()
e_tube = ExperimentTube()
%time s_tube = e_tube.get_initial_state()
s_tube.plot()
%time states_tube = evolve(s_tube, periods=2)
plot(states_tube)
w_x, w_perp = e.ws[0], e.ws[1]
x_TF = np.sqrt(2*e.mu /e.m)/w_x
m, h = e.m, e.hbar
hw = e.hbar*w_perp
V_TF = -hw
#print(V_TF, s.get_V_TF_from_mu(s.mu))
V = np.linspace(-e.mu, 0, 1000)
mu_eff_hw = (V_TF - V) / hw + 1
sigma2w = h * (mu_eff_hw + np.sqrt(mu_eff_hw**2 + 3.0)) / (3 * m)
n_1D = 2 * np.pi * m * np.maximum(0, sigma2w**2 - (h / m) ** 2) / e.g
plt.plot(V/e.mu, sigma2w)
plt.plot(V/e.mu, n_1D)
#plt.plot(V_ext/e.mu, s.get_n_TF(V_TF=V_TF, V_ext=V_ext))
V_TF = s.get_V_TF_from_mu(s.mu)
plt.plot(s.x, s.get_Vext()/s.mu)
plt.axhline([V_TF/s.mu])
plt.ylim(-1, 0)
s.get_n_TF(V_TF=V_TF)
In principle this should work, but something is askew. One issue that can arise here is that the tube code requires at least one mode to be occupied in the radial direction, which requires \(\mu > \hbar \omega_\perp\), exceeding the radial zero-point energy. To see this, note that the effective potential for the tube code is
s.get_n_TF(V_TF=V_TF)
print(f"μ/ℏω = {s.mu/(s.hbar*s.w0_perp):.4f}")
kw = dict(dx_healing_length=0.2, sigma_healing_length=0.1)
e0 = ExperimentAxial(**kw)
s0 = e0.get_state()
plt.plot(s0.xyz[0], s0.get_Vext()[:, 0])
e = ExperimentTube(**kw)
s = e.get_state()
plt.plot(s.xyz[0], s.get_Vext())
e = ExperimentTube(**kw)
%time s = e.get_initial_state()
s.plot()
%time states = evolve(s, periods=2)
plot(states)
plt.figure()
states[-1].plot()
Tube TF Issue#
import numpy as np
import matplotlib.pyplot as plt
%load_ext autoreload
%autoreload 2
import gpe.bec, gpe.utils, gpe.minimize
import gpe.tube
u = gpe.bec.u
class StateMixin:
def __init__(self, experiment, **kw):
self.experiment = experiment
super().__init__(**kw)
def get_ws(self, t):
# Needed because the axial code also supports expansion.
return self.experiment.ws
def get_Vext(self):
# Delegate to the experiment.
return self.experiment.get_Vext(state=self)
# Note: StateMixing must come first so that we can assign the experiment.
class State(StateMixin, gpe.bec.StateBase):
pass
# Note: StateMixing must come first so that we can assign the experiment.
class StateTube(StateMixin, gpe.tube.StateGPEdrZ):
pass
class Experiment(gpe.utils.ExperimentBase):
# Physical parameters for experiemnt
trapping_frequencies_Hz = (50.0, 200.0, 200.0) # Trap frequencies
Ntot = 200 # Number of particles
m = u.m_Rb87 # We use 87Rb here.
hbar = u.hbar # Physical units according to `gpe.bec.u`.
species = (2,0) # Which hyperfine state - defines the interaction.
# Numerical parameters
L_TF = 1.5 # Length of box as a fraction of the TF radius
dx_healing_length = 0.5 # Minimum resolution
# Parameter for knife-edge and phase imprint
x0_TF = 0.1 # Location of imprint in units of x_TF
V0_mu = 2.0 # Depth of the knife
sigma_micron = 0.1 # With of knife in micron
dphi = np.pi # Initial phase difference
State = State # Which state to use
def init(self):
"""Perform any initializations."""
a = u.scattering_lengths[(self.species, self.species)]
self.g = 4*np.pi * self.hbar**2 * a / self.m
self.ws = 2*np.pi * np.asarray(self.trapping_frequencies_Hz) * u.Hz
# Use TF results to get mu from Ntot
self.mu = self.m/2 * (
15*self.g * np.prod(self.ws) * self.Ntot
/ (4*np.pi * self.m))**(2/5)
self.healing_length = self.hbar / np.sqrt(2 * self.m * self.mu)
rs_TF = np.sqrt(2 * self.mu / self.m) / self.ws
self.Lxyz = 2 * self.L_TF * rs_TF
dx = self.dx_healing_length * self.healing_length
# Get good lattice sizes for use with the FFT (small prime factors)
self.Nxyz = list(map(gpe.utils.get_good_N, self.Lxyz / dx))
self.V0 = self.V0_mu * self.mu
self.sigma = self.sigma_micron * u.micron
x_TF = rs_TF[0]
self.x0 = self.x0_TF * x_TF
self.state_args = dict(
Nxyz=self.Nxyz, Lxyz=self.Lxyz,
mu=self.mu, g=self.g, m=self.m, hbar=self.hbar)
super().init() # Be sure to call other init() functions.
def get_state(self):
"""Return (quickly) a state instance."""
return self.State(experiment=self, **self.state_args)
def get_initial_state(self):
"""Return the initial state for a simulation."""
state0 = self.get_state()
# The experiments imprint the phase with an external step potential.
# We cheat here by minimizing with the desired phase.
x = state0.xyz[0] + np.zeros(state0.shape) # Sometimes we need a full array
phase = np.exp(1j*np.where(x < self.x0, -self.dphi/2, self.dphi/2))
minimizer = gpe.minimize.MinimizeStateFixedPhase(state0, phase=phase, fix_N=True)
state0 = minimizer.minimize()
# Always use a fresh state in case the minimizer alters cooling_phase etc.
state = self.get_state()
state.set_psi(state0.get_psi())
return state
def get_Vknife(self, x):
return self.V0 * np.exp(-(x/self.sigma)**2/2)
def get_Vext(self, state):
"""Return Vext. The state will call this."""
xyz = state.get_xyz()
Vext = self.m / 2 * sum([(w*x)**2 for w, x in zip(self.ws, xyz)])
if state.initializing or state.t < 0:
x = xyz[0]
Vext -= self.get_Vknife(x-self.x0)
return Vext
class ExperimentTube(Experiment):
# This is much cheaper, so we can be more generous.
L_TF = 2.0
dx_healing_length = 0.4
State = StateTube
def init(self):
super().init()
Nx = self.Nxyz[0]
Lx = self.Lxyz[0]
# Current code requies a basis... this should be fixed
self.state_args.update(Nxyz=(Nx,), Lxyz=(Lx,))
state = self.get_state()
#self.mu = state.get_mu_from_V_TF(self.mu) #/2.03435
self.state_args.update(mu=self.mu)
#self.state_args.update(x_TF=3.0)
e0 = Experiment(V0_mu=0) # Turn off knife to check TF approximation
s0 = e0.get_state()
#s0.plot()
assert np.allclose(s0.get_N(), e0.Ntot, rtol=1e-3)
e = ExperimentTube(V0_mu=0)
s = e.get_state()
s.plot()
plt.plot(s0.xyz[0].ravel(), s0.get_density_x(), '--')
assert np.allclose(s.get_N(), e.Ntot, rtol=1e-2)
%connect_info
x = s.xyz[0]
V_ext = s.get_Vext()
V_TF = s.get_V_TF(x_TF=3.0)
print(V_TF)
n_TF = s.get_n_TF(V_TF=V_TF)
#plt.plot(x, V_ext)
plt.plot(x, n_TF)
plt.plot(x, n_1D)
if False:
V_TF = s.get_V_TF(x_TF=3.0)
g = V_ext = None
self = s
zero = np.zeros(self.shape)
if g is None:
g = self.g
if V_ext is None:
V_ext = self.get_Vext()
V = V_ext + zero
h = self.hbar
m = self.m
w = self.w0_perp
hw = h * w
mu_eff_hw = (V_TF - V) / hw
mu_eff_hw += 1.0 # This is the extra hbar*w0_perp piece
sigma2w = h * (mu_eff_hw + np.sqrt(mu_eff_hw**2 + 3.0)) / (3 * m)
n_1D = 2 * np.pi * m * np.maximum(zero, sigma2w**2 - (h / m) ** 2) / g
plt.plot(V)
if False:
h = self.hbar
m = self.m
w = self.w0_perp
hw = h * w
mu_eff_hw = (V_TF - V) / hw
mu_eff_hw += 1.0 # This is the extra hbar*w0_perp piece
sigma2w = h * (mu_eff_hw + np.sqrt(mu_eff_hw**2 + 3.0)) / (3 * m)
n_1D = 2 * np.pi * m * np.maximum(zero, sigma2w**2 - (h / m) ** 2) / g
self = s
x_TF = 3.0
V_TF = self.get_V_TF(x_TF=x_TF)
s.get_V_TF_from_mu(self.get_mu_from_V_TF(V_TF=self.get_V_TF(x_TF=x_TF))), V_TF
self.get_mu_from_V_TF(V_TF=self.get_V_TF(x_TF=x_TF)), s.mu
s.get_mu_from_V_TF(self.mu), V_TF